ADRC - 01 - Modello Distribuito
1 Lecture Info
Data:
Capitolo del libro: 1 - Distributed Computing Environments
L'obiettivo del corso di ADRC è quello di introdurre il mondo del calcolo distribuito. A tale fine in questa prima lezione abbiamo definito il modello di calcolo distribuito che sarà poi utilizzato durante il corso. La lezione è stata terminata discutendo un esempio di esecuzione distribuita, anche per far capire le differenze tra un modello centralizzato e uno distribuito.
2 Descrizione Modello Distribuito
A differenza da un modello di calcolo centralizzato in cui abbiamo una sola unità di computazione, il modello distribuito che andremmo ad utilizzare è formato da una collezione finita di entità di computazione. Tale collezione verrà indicata con il simbolo \(\xi\).
Ogni entità \(x \in \xi\) ha una serie di capacità, tra cui troviamo
Accesso ad una memoria privata \(M_x\) che contiene una serie di registri, tra cui troviamo anche i seguenti
\(\text{status}(x) := \text{ stato del nodo } x\)
\(\text{value}(x) := \text{ input del nodo } x\)
Notiamo come il valore di \(\text{status}(x)\) è preso da un insieme finito di stati \(S\).
Accesso ad un local alarm clock \(C_x\).
Abilità di inviare e ricevere dei messaggi, che vengono utilizzati per comunicare con le altre entità.
Ogni entità \(x \in \xi\) può effettuare le seguenti operazioni
Local storage and processing.
Transmission of messages.
(re)-Setting of alarm clock.
Changing value of status register.
2.1 Eventi, Azioni e Comportamento di una Entità
Le entità \(x \in \xi\) si comportano in modo reattivo, nel senso che ogni entità risponde solamente se sottoposta a eventi esterni. Ci sono tre tipologie di eventi esterni, tra cui troviamo:
Ricezione di un messaggio.
Sveglia dell'alarm clock.
Impulsi spontanei.
Mentre le prime due tipologie di eventi esterni sono esterni rispetto all'entità, ma sono comunque generati all'interno del sistema distribuito, la terza tipologia di eventi esterni, gli impulsi spontanei, sono eventi che vengono generati al di fuori del sistema e che sono utilizzati per far partire la computazione distribuita.
Quando una entità \(x \in \xi\) riceve un evento \(e\), l'entità \(x\) esegue una serie di operazioni che prende il nome di action (azione). Una action, per poter essere definita tale, deve rispettare le seguenti proprietà:
Deve essere finita, ovvero deve contenere un numero finito di operazioni;
Deve essere indivisibile, ovvero le operazioni contenute nella action devono essere eseguite una dopo l'altra, senza interruzioni;
Deve essere terminante, ovvero una volta iniziata deve terminare in un tempo finito.
La particolare azione che viene eseguita dipende dai seguenti due fattori
Il tipo di evento \(e\);
Lo stato in cui si trovata l'entità nell'istante in cui si riceve l'evento \(e\).
Per descrivere questa associazione si utilizzano quindi delle regole della forma
\[\text{ Status } \times \text{ Event } \rightarrow \text{ Action }\]
Il comportamento di una entità \(x \in \xi\) è definito come l'insieme di tutte le regole applicate al nodo \(x\), e viene indicato con il simbolo \(B(x)\). Tale comportamento deve essere completo e non-ambiguo, ovvero per ogni coppia \((s, e)\) con \(s\) stato ed \(e\) evento, si deve avere che
\[|\{ r \in B(x): \,\, r \text{ è attivata da } (s, e) \}| = 1\]
ovvero ci deve essere una e una sola regola \(r\) attivata dalla coppia \((s, e)\). L'insieme \(B(x)\) è anche chiamato il protocollo di x.
Il comportamento collettivo di una collezione di entità \(\xi\) è l'insieme
\[B(\xi) := \{B(x) : \,\, x \in \xi\}\]
Tale insieme definisce il nostro protocollo (o algoritmo) distribuito. Esistono varie tipologie di comportamenti collettivi, tra cui troviamo anche il seguente
Definizione: Un protocollo distribuito \(B(\xi)\) è detto omogeneo se e solo se
\[\forall x, y \in \xi: \,\, B(x) = B(y)\]
Ogni protocollo distribuito può essere trasformato in un protocollo distribuito omogeneo andando ad introdurre una variabile nella memoria di ogni nodo che specifica il particolare ruolo del nodo e modificando le azioni da eseguire in modo da tenere conto del ruolo.
2.2 Messaggi e Topologia di Comunicazione
Le entità comunicano tra loro inviandosi dei messaggi, che sono sequenze finite di bits. Per ogni nodo \(x \in \xi\) definiamo
\(N_{out}(x) :=\) L'insieme delle entità a cui \(x\) può inviare un messaggio in modo diretto.
\(N_{in}(x) :=\) L'insieme delle entità che possono inviare un messaggio diretto ad \(x\).
Questa relazione di "vicinato" definisce un grafo diretto \(\overrightarrow{G} = (V, \overrightarrow{E})\), dove \(V\) è l'insieme dei nodi, ciascuno dei quali rappresenta una entità in \(\xi\), ed esiste l'arco \((x, y)\) sse \(x\) può inviare un messaggio all'entità \(y\), ovvero sse \(x \in N_{in}(y)\).
Il grafo \(\overrightarrow{G}\) descrive la topologia di comunicazione del nostro ambiente di lavoro. Rispetto al grafo \(\overrightarrow{G}\) troviamo le seguenti notazioni utili da ricordare
\(n(\overrightarrow{G}) := \text{ numero di vertici.}\)
\(m(\overrightarrow{G}) := \text{ numero di archi.}\)
\(d(\overrightarrow{G}) := \text{ diametro del grafo.}\)
2.3 Assiomi e Restrizioni
Il modello distribuito classico con comunicazione point-to-point utilizza i seguenti assiomi di base:
Finite Communication Delay
In assenza di failures i ritardi di comunicazione sono finiti.
Local Orientation
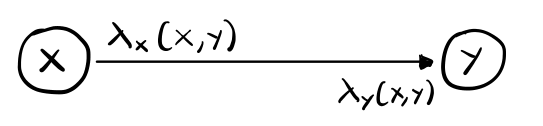
Ogni entità è in grado di identificare e distinguere ciascun vicino, sia entrante che uscente. Questa identificazione avviene tramite l'utilizzo di una funzione local al nodo \(\lambda_x(\cdot)\) che associa a ciascun arco incidente al nodo un particolare numero di porta.
\[\lambda_x(x, y) := \text{ etichetta associata dal nodo } x \text{ all'arco } (x, y)\]
La funzione \(\lambda_x(\cdot)\) deve essere iniettiva in modo da permettere al nodo di identificare univocamente ogni vicino. Osserviamo poi come due entità diverse possono assegnare due etichette diverse allo stesso arco. In formula
\[\underbrace{\lambda_x(x, y)}_{\text{ locale a } x} \neq \underbrace{\lambda_y(x, y)}_{\text{locale a } y}\]
questo significa che ogni arco del grafo ha esattamente due etichette.
Oltre a questi assiomi base, il modello può essere caratterizzato da altri tipi di assunzioni che prendono il nome di restrizioni. Notiamo che ogni tipo di assunzione extra che utilizzamo in un protocollo limita (o restringe) l'applicabilità del procollo stesso. Bisogna quindi essere molto cauti nell'utilizzo di queste restrizioni.
2.3.1 Communication Restrictions
Queste restrizioni agiscono sul modo in cui i messaggi vengono inviati e processati dalle entità del modello, e sono:
Message Ordering
In assenza di failures i messaggi inviati da una entità alla stessa entità in uscita arrivano nell'ordine in cui sono stati inviati.
Reciprocal Communication
Per ogni entità \(x \in \xi\) si ha
\[N_{in}(x) = N_{out}(x)\]
dunque, se \((x, y) \in \overrightarrow{E}\), allora \((y, x) \in \overrightarrow{E}\). Notiamo però che utilizzando questa restrizione in generale si può avere che \(\lambda_x(x, y) \neq \lambda_x(y, x)\). Questo significa che il nodo \(x\) non sempre è in grado di capire se i due archi identificati dai numeri \(\lambda_x(x, y)\) e \(\lambda_x(y, x)\) lo connettono allo stesso nodo \(y\) oppure no.
Bidirectional Links
Per ogni entità \(x \in \xi\) si ha
\[N_{in}(x) = N_{out}(x) \,\,\,\ \land \,\,\,\, \lambda_x(x, y) = \lambda_x(y, x)\]
utilizzando questa restrizione possiamo quindi modellare la topologia di comunicazione come un grafo non diretto \(G=(V,E)\). In questo caso possiamo quindi considerare, per ogni nodo \(x \in V\), un solo insieme di vicini, in quanto
\[N_{in}(x) = N_{out}(x) =: N(x)\]
tale insieme sarà chiamato il vicinato di \(x\).
2.3.2 Reliability Restrictions
Queste restrizioni agiscono sulla presenza degli errori e sulle possibilità di gestione degli errori da parte delle entità del modello.
Edge Failure Detection
Per ogni arco \((x, y) \in \overrightarrow{E}\), entrambi i nodi \(x, y\) sono in grado di capire sia se l'arco \((x, y)\) non funziona per via di qualche failure e sia quando ritorna a funzionare a seguito di una failure.
Entity Failure Detection
Per ogni nodo \(x \in V\), tutti i nodi \(y \in N_{in}(x) \cup N_{out}(x)\) adiacenti a \(x\) sono in grado di capire sia se il nodo \(x\) non funziona per via di qualche failure e sia quando ritorna a funzionare a seguito di una failure.
Guaranteed Delivery
Tutti i messaggi che vengono inviati saranno ricevuti senza nessun tipo di perdità di dati.
Partial Reliability
Nessun fallimento accadrà nel futuro. Con questa restrizione non escludiamo il caso che i fallimenti siano potuti accadere prima dell'esecuzione di una computazione.
Total Reliability
Con questa restrizione si esclude la possibilità di fallimenti, sia passati che futuri.
2.3.3 Topological Restrictions
Queste restrizioni agiscono sulla topologia della rete di comunicazione.
Connectivity
La topologia di comunicazione \(\overrightarrow{G}\) è fortemente connessa, ovvero per ogni coppia di nodi \(u, v \in V\) esiste un cammino \(\pi\) che connette \(u\) a \(v\).
2.3.4 Time Restrictions
Queste restrizioni agiscono sulla gestione del tempo e dei ritardi nel modello.
Bounded Communication Delay
Esiste una costante \(\Delta\) tale che, in assenza di fallimenti, il ritardo nell'invio di qualsiasi messaggio in qualsiasi arco è al più \(\Delta\).
Unitary Communication Delay
In assenza di fallimenti il ritardo nell'invio di qualsiasi messaggio in qualsiasi arco è al più \(1\).
Syncronized Clocks
Tutti i clocks locali vengono incrementati di \(1\) unità in modo simultaneo, e gli intervalli di tempo tra un incremento e il successivo è costante.
2.4 Complessità di un Protocollo Distribuito
La complessità di un protocollo distribuito può essere descritta rispetto alle seguenti tre quantità di interesse
2.4.1 Message Complexity
La message complexity vuole misurare le risorse utilizzate per lo scambio dei messaggi tra le varie entità. A tale fine sono definite le seguenti quantità
Message cost
\[M := \text{ numero di messaggi inviati}\]
Entity workload
\[L_{node} := \frac{M}{|V|}\]
Transmission load
\[L_{link} := \frac{M}{|E|}\]
2.4.2 Bit Complexity
Al posto di considerare i messaggi possiamo anche misurare il numero di bits inviati durante la comunicazione. In particolare abbiamo le seguenti misure
Bit complexity
\[B := \text{ numero di bits trasmessi}\]
Entity bit-workload
\[Lb_{node} := \frac{B}{|V|}\]
Transmission bit-load
\[Lb_{link} := \frac{B}{|E|}\]
2.4.3 Time Complexity
Possiamo infine considerare il tempo richiesto per l'esecuzione del protocollo in questione. Per poter effettuare questa stima necessitiamo delle restrizioni Unitary Transmission Delay e Synchronized Clocks.
Questa misura prende il nome di ideal time complexity.
2.5 Stato Globale di un Ambiente Distribuito
Al fine di poter definire lo stato globale del nosto ambiente distribuito iniziamo descrivendo le condizioni iniziali del sistema.
Sia \(x \in \xi\) una entità. Indichiamo con il simbolo \(\sigma(x, 0)\) lo stato iniziale interno dell'entità \(x\). Tale stato contiene al suo interno i seguenti elementi
Il contenuto iniziale di tutti i registri di \(x\).
Il valore iniziale del local alarm clock \(C_x\) di \(x\).
Una descrizione statica del sistema prima dell'esecuzione del protocollo distribuito è quindi la seguente
\[\Sigma(0) := \{ \sigma(x, 0): \,\,\, x \in \xi\}\]
Ricordiamo che nel modello che stiamo descrivendo ci sono tre tipologie di eventi, che sono
Spontaneous impulses (spontaneously).
Reception of a message (receiving).
Alarm clock ring (when).
L'esecuzione di una azione può potenzialmente generare nuovi eventi. Ad esempio l'operazione send() genera un nuovo evento di tipo receiving, mentre l'operazione set_alarm() genera un evento di tipo when. Anche se gli eventi vengono generati, questo non implica necessariamente che verranno verificati durante l'esecuzione del protocollo. A seconda delle dinamiche della particolare esecuzione infatti potrebbero accadere varie cose, tra cui il fallimento di determinati nodi e archi, che potrebbe portare un evento generato a non verificarsi. Inoltre, anche nel caso in cui un evento generato finisce per verificarsi, non lo fa nel momento in cui viene generato, ma solo in un tempo successivo. Alcune volte il delay tra quando l'evento viene generato e quando si verifica è noto, mentre altre volte non lo è. Questo significa che diversi delay danno forma a diverse esecuzioni dello stesso protocollo, che possono quindi portare a diversi outcomes. In ogni caso la correttezza di un protocollo non deve dipendere dal particolare ordine in cui gli eventi si verificano.
Indichiamo con \(t(e)\) il tempo di generazione dell'evento \(e\). Tutti gli spontenous impulses vengono generati al tempo \(t = 0\), in quanto sono proprio gli eventi che fanno partire l'esecuzione del protocollo. L'insieme che contiene questi eventi è detto set of initial events.
Nel nostro modello il tempo è visto dagli occhi di un osservatore esterno al sistema. Dato un istante di tempo \(t\) è possibile separare l'asse del tempo nelle seguenti \(3\) parti
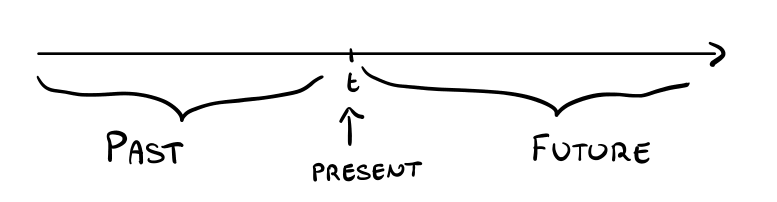
Indichiamo con \(Future(t)\) l'insieme degli eventi futuri che sono stati generati al tempo \(\leq t\) e che ancora devono verificarsi.
Prendendo in considerazione il tempo \(t\) indichiamo con \(\sigma(x, t)\) lo stato interno dell'entità \(x\) al tempo \(t\). Seguono due proprietà importanti relative agli stati interni delle entità
Proprietà 1: Supponiamo che uno stesso evento accada al nodo \(x\) al tempo \(t\) in due esecuzioni diverse, e indichiamo \(\sigma_1, \sigma_2\) gli stati interni di \(x\) nelle due esecuzioni. Se \(\sigma_1 = \sigma_2\) allora il nuovo stato interno di \(x\) sarà lo stesso in entrambe le esecuzioni.
Proprietà 2: Supponiamo che uno stesso evento accada al nodo \(x\) e al nodo \(y\) al tempo \(t\) nella stessa esecuzione, e siano \(\sigma_x, \sigma_y\) gli stati interni di \(x\) e \(y\). Se \(\sigma_x = \sigma_y\) allora il nuovo stato interno di \(x\) sarà lo stesso del nuovo stato interno di \(y\).
Siamo adesso in grado di descrivere lo stato globale del nostro sistema al tempo \(t\). Infatti, una descrizione statica del nostro sistema al tempo \(t\) è data da
\[\Sigma(t) := \{\sigma(x, t): \,\, x \in \xi\}\]
notiamo però che la particolare esecuzione potrebbe aver generato degli eventi che ancora devono verificarsi. Per descrivere in modo completo lo stato globale al tempo \(t\) necessitiamo quindi le seguenti cose
\[C(t) := \Big(\Sigma(t), Future(t) \Big)\]
La configurazione iniziale \(C(0)\) oltre a contenere l'insieme degli stati iniziali \(\Sigma(0)\) contiene anche l'insieme degli eventi spontanei, rappresentato da \(Future(0)\). Ambienti che differiscono solamente nella loro configurazione iniziale \(C(0)\) sono chiamati istanze dello stesso sistema.
2.6 Problemi e Soluzioni
Un problema \(P\) per il nostro modello distribuito è definito come una tripla
\[P = \langle P_{init}, P_{final}, R \rangle\]
in cui,
\(P_{init}\) è un predicato che vincola i valori dei registri delle entità all'inizio della computazione.
\(P_{final}\) è un predicato che vincola i valori dei registri delle entità alla fine della computazione.
\(R\) è un insieme di restrizioni.
Un protocollo \(B\) che risolve il problema \(P\) deve specificare come le entità possono passare dal soddisfare la condizione \(P_{init}\) al soddisfare la condizione \(P_{final}\) sotto i vincoli imposti da \(R\).
Un passo importante nella definizione di un protocollo distribuito è la definizione dei possibili stati in cui le entità del modello si possono trovare. Tra le varie tipologie di stati troviamo i seguenti di particolare interesse
\(S_{init}\) := Stati utilizzati all'inizio dell'esecuzione del protocollo.
\(S_{term}\) := Stati che una volta raggiunti non possono essere cambiati dal protocollo.
\(S_{start}\) := Stati in \(S_{init}\) che fanno partire l'esecuzione del protocollo.
\(S_{final}\) := Stati in \(S_{term}\) in cui non c'è bisogno di effettuare alcuna attività.
Notiamo che
\[S_{final} \subseteq S_{term} \,\,\,\,,\,\,\,\, S_{start} \subseteq S_{init}\]
Diciamo che un protocollo \(B\) termina se, per ogni configurazione iniziale \(C(0)\) che soddisfa \(P_{init}\) e per ogni esecuzione che parte dallo stato iniziale \(C(0)\), il predicato
\[\text{Terminate}(t) \equiv \Big(\{status_t \subseteq S_{term}\}\Big) \land \Big( Future(t) = \emptyset\Big)\]
vale per qualche valore di \(t\).
Si parla invece di terminazione esplicita quando tutti i nodi sono consapevoli del fatto che il protocollo è terminato. Questa situazione è verificata quando
\[\text{Explicit_Terminate}(t) \equiv \Big( \{status_t\} \subseteq S_{final} \Big)\]
è verificato per qualche \(t\).
Infine, diciamo che il protocollo \(B\) è corretto se per tutte le configurazioni che partono da una configurazione iniziale che soddisfa \(P_{init}\), si ha che
\[\exists t > 0: \,\, \forall t' > t: P_{final}(t)\]
3 Esempio di Esecuzione Distribuita
Consideriamo \(n\) bambini. Tutti gli \(n\) bambini hanno giocato nel fango, ma solo alcuni di loro si sono sporcati la fronte di fango. La maestra si è accorta di questo e li ha messi tutti in punizione. Per rimuovere la punizione ha proposto il seguente gioco: ogni minuto, per \(n\) volte, la maestra entrerà nella stanza dei bambini per permettere ai bambini che hanno la fronte sporca di farsi avanti. Se alla fine delle \(n\) entrate c'è almeno un bambino con la fronte sporca che non si è fatto avanti, tutti i bambini rimangono in punizione. Nel mentre i bambini non possono parlare tra loro. Ciascuno di loro può solo vedere le fronti degli altri \(n-1\) bambini. Il nostro obiettivo è quello di trovare un comportamento che i bambini possono seguire in modo tale da vincere il gioco proposto dalla maestra per tornare a giocare nel fango.
Come è solito in informatica, il passo fondamentale nella risoluzione di un problema è proprio la modellazione del problema. Molto spesso infatti i problemi sono facilmente risolubili una volta che si è capito come rappresentarli nel modo migliore.
Nel nostro caso possiamo modellare il nostro sistema come un sistema distribuito in cui ciascun bambino rappresenta una entità del sistema. Ogni entità è collegata con tutte le altre, ma non con se stessa. Il nostro obiettivo è quindi quello di definire un protocollo distribuito che fa fare un passo avanti a tutti e soli i bambini con la fronte sporca.
Per cercare di trovare un possibile protocollo analizziamo la situazione in cui sappiamo che ci sono esattamente \(k\) bambini con la fronte sporca, con \(k \in \{1, ..., n\}\). Notiamo che la conoscenza rispetto al parametro \(k\) per ogni bambino è la seguente: se il bambino ha la fronte sporca, allora conosce \(k-1\); altrimenti conosce \(k\). Il problema è che il bambino non sa in quale delle due situazioni si trova. Per cercare di risolvere questo problema l'idea è quella di utilizzare il fatto che la maestra entra ed esce. I bambini infatti si possono mettere d'accordo nel seguente modo: quando la maestra entra al tempo \(t\), tutti i bambini che vedono esattamente \(t-1\) fronti sporche si fanno avanti.
Notiamo che assumendo che tutti i bambini seguono il protocollo, il protocollo funziona bene. Infatti arrivati al tempo \(t\), se nessun bambino si è fatto avanti, si deve necessariamente avere che \(k > t-1\). Se poi un bambino vede esattamente \(t-1\) fronti sporche, allora sa anche che \(t-1 \leq k \leq t\). Ma dalla conoscenza che \(k > t-1\) l'unica possibilità rimanente è che \(k = t\). Ma se \(k = t\) allora il bambino che vede \(t-1\) fronti sporche deve necessariamente avere lui stesso la fronte sporca. Dunque tutti i bambini con la fronte sporca si fanno avanti nello stesso round.